Settings for Arduino G-Code Interpreter
Hi Contraptionists,
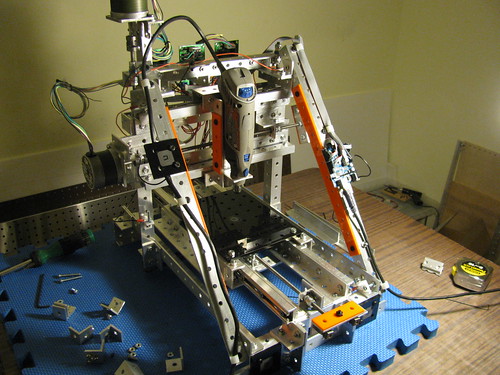
I assembled my Mini CNC and I'm looking forward for making some controlles GCode movements. Until now it moves, but not as I expect.
First of all a descripion of my environment with some specifications.
Hardware
- Arduino Board Duemilanove with Atmega328
- Reprap Stepper Motor Driver v1.2
- Mini CNC with threaded-rods 1/4-20
- Alltronics #44A501711 NEMA23 motors
Unipolar stepper motor. This motor is a NEMA size 23. Specs are 60 in/oz Holding Torque, 200 steps/rev, 2.3V, 2.3A, DC, 80 C degree Rise
Software, Firmware
According to the explanations on Arduino G-Code Interpreter I'm using the following settings in the file _init.pde
// define the parameters of our machine. #define X_STEPS_PER_INCH 4000 // 200 steps/rev + 20 threads per inch * steps in a revolution #define X_STEPS_PER_MM 157.480315 // *_STEPS_PER_INCH / 25.4 #define X_MOTOR_STEPS 200 // to double because of half stepping? X_STEPS_PER_INCH also? #define Y_STEPS_PER_INCH 4000 #define Y_STEPS_PER_MM 157,480315 #define Y_MOTOR_STEPS 200 #define Z_STEPS_PER_INCH 4000 #define Z_STEPS_PER_MM 157,480315 #define Z_MOTOR_STEPS 200 //our maximum feedrates #define FAST_XY_FEEDRATE 1200.0 // just a assumption #define FAST_Z_FEEDRATE 1200.0 // just a assumption // Units in curve section #define CURVE_SECTION_INCHES 0.019685 #define CURVE_SECTION_MM 0.5 // Set to one if sensor outputs inverting (ie: 1 means open, 0 means closed) // RepRap opto endstops are *not* inverting. #define SENSORS_INVERTING 0 // How many temperature samples to take. each sample takes about 100 usecs. #define TEMPERATURE_SAMPLES 5 /**************************************************************************************** * digital i/o pin assignment * * this uses the undocumented feature of Arduino - pins 14-19 correspond to analog 0-5 ****************************************************************************************/ //cartesian bot pins, settings for Contraptor wiring #define X_STEP_PIN 3 #define X_DIR_PIN 4 #define X_ENABLE_PIN 5 #define X_MIN_PIN 6 #define X_MAX_PIN 7 #define Y_STEP_PIN 8 #define Y_DIR_PIN 9 #define Y_ENABLE_PIN 10 #define Y_MIN_PIN 11 #define Y_MAX_PIN 12 #define Z_STEP_PIN 14 #define Z_DIR_PIN 15 #define Z_ENABLE_PIN 16 #define Z_MIN_PIN 17 #define Z_MAX_PIN 18 // I kicked off the extruder stuff
If I use these GCode commands
G3 X0 Y0 I1 J0 F10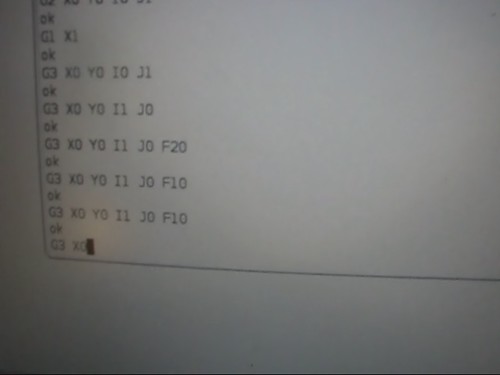 . I also doubled the values for *_STEPS_PER_INCH, *_STEPS_PER_MM and *_MOTOR_STEPS without any success.
. I also doubled the values for *_STEPS_PER_INCH, *_STEPS_PER_MM and *_MOTOR_STEPS without any success.
Where is my shortcoming?
Please help!
Christoph